Environment Reactive Robot
Developed for the MTE 121 Design project, using Lego Technics we developed a simple reactive robot that reacts to its surroundings as well as local interactions with people. Capable of producing a set of 5 emotions, the robot had a reaction to any interaction it could sense.
About
Meet PIBOT, your Friendly Personal Interactive Robot,
Designed during COVID-19, with social interaction falling off significantly, we felt that people needed a friend to keep around them. To solve this, we designed a small robot that interacts with the user and reacts accordingly to the user's interactions.

The Six States
Action and Reaction requirements
Our Robot was designed with Six states that the robot may be in. Based on different emotions and potential reactions to interactions the user could provide, the following states were designed.






Logic Design
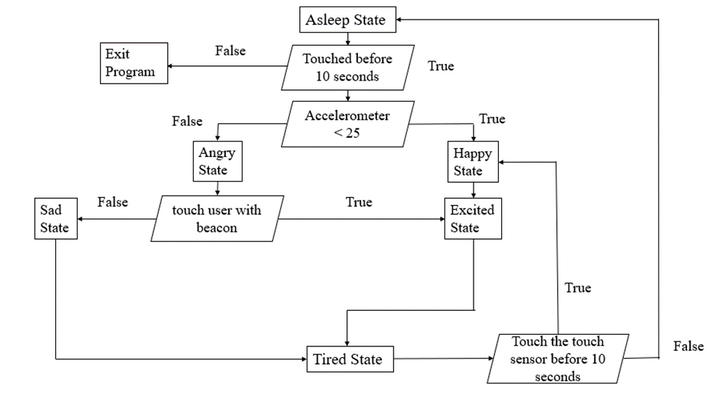
Given below is the Logic that the robot follows. Placed in a flow chart, the robot states, as well as the required conditions for each state. There are 5 basic potential pathways the robot could function starting at the Asleep state:
-
Asleep
-
Asleep → Happy → Excited → Tired → Asleep
-
Asleep → Happy → Excited → Tired → Happy → Excited → Tired → Asleep
-
Asleep → Angry → Sad → Tired → Asleep
-
Asleep → Angry → Excited → Tired → Asleep
Constraints
Because of the given project items, we had major electrical and mechanical constraints that disallowed us to go for a more advanced design.
1 / Given Sensors
We were limited to given sensors. For example, our location tracking sensor requires an external beacon that the user must carry for the robot to track the user. Additionally, this made us plan our design around what the sensors would allow for.
2 / Number of inputs
With the Lego EV3, we are restricted to 4 sensor inputs. This restricted what type of interactions we could have accounted for. Because of this, we had to fall back on mostly physical interactions between the user and the robot.